Cost-Effective and Fast 3D Mapping System for Large-Scale Complex Environment
KEY INFORMATION
Green Building - Sensor, Network, Building Control & Optimisation
TECHNOLOGY OVERVIEW
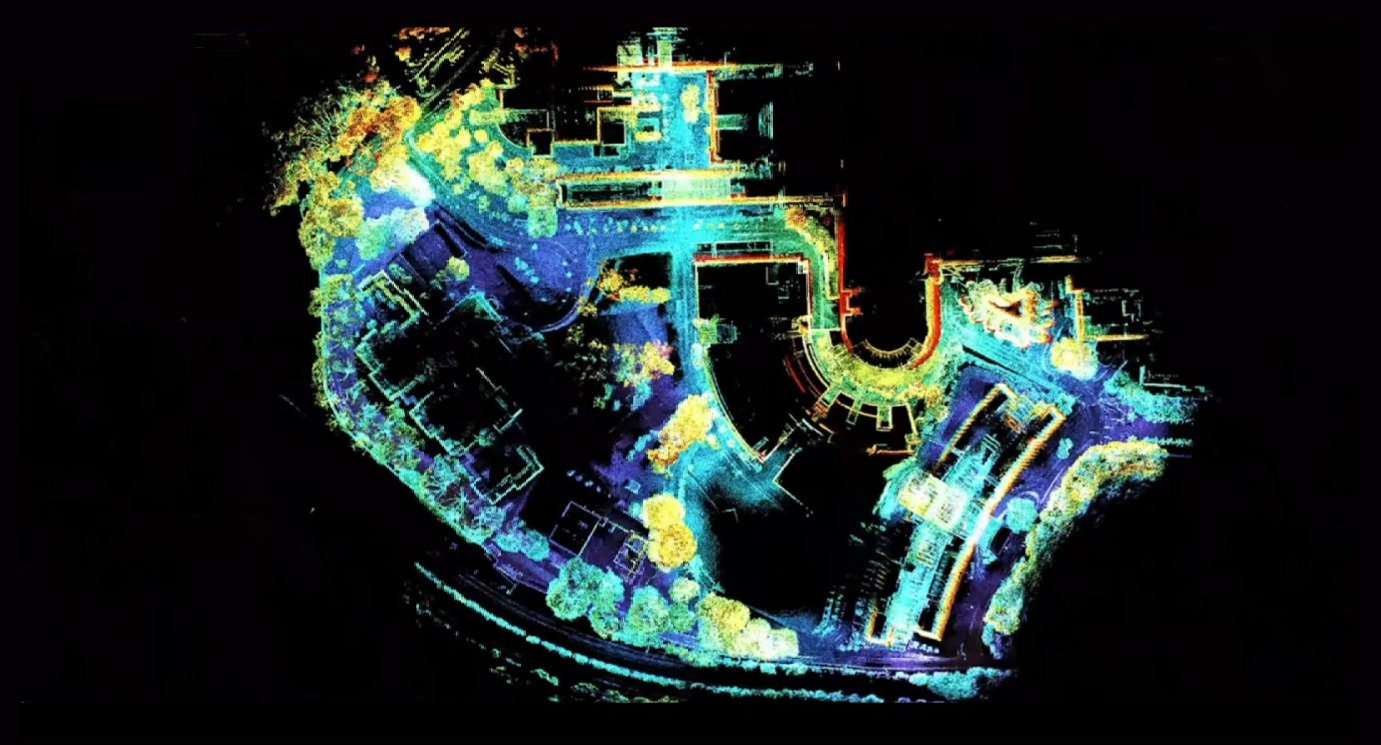
In the contemporary landscape of construction and urban development, centimetre-level high-accuracy point cloud maps are of paramount importance, especially when used for 3D digitalization and modelling. The point cloud map provides a robust spatial foundation for various applications, including intricate infrastructure 3D modelling and urban digital twins. Through the generation of 3D models, it can also be utilised for Automated Guided Vehicle (AGV) and Autonomous Mobile Robot (AMR) use-cases.
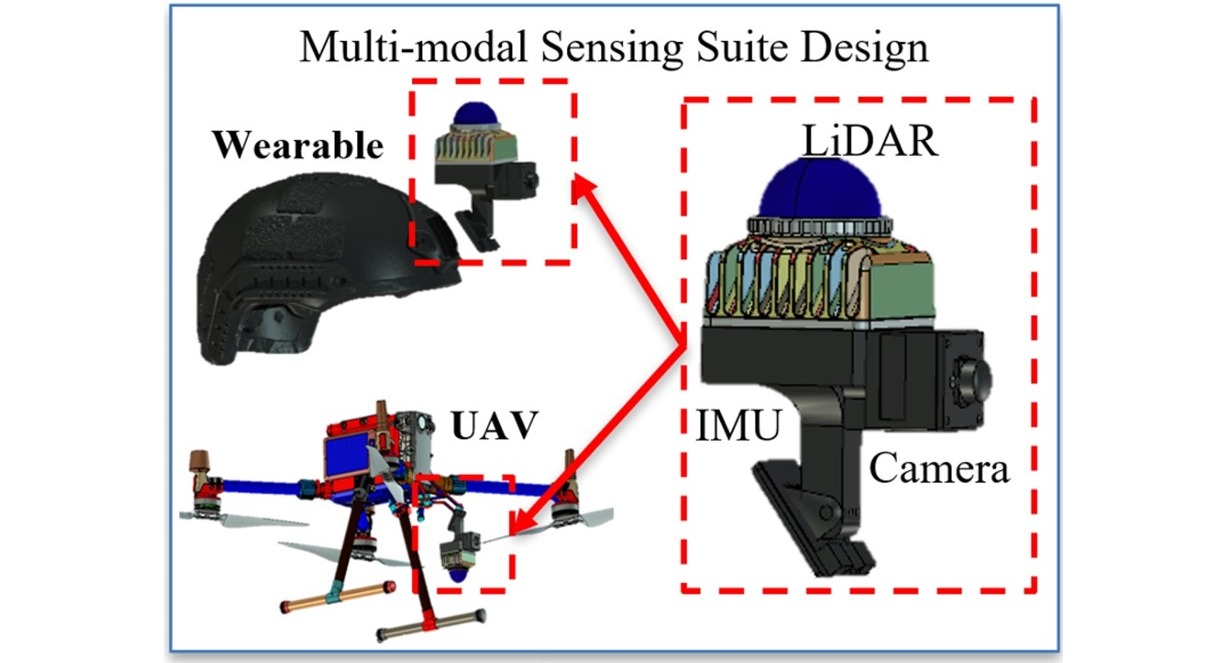
The technology owner has developed a cost-effective and fast 3D mapping and scan-to-BIM product solution. The technology solution utilises cost-effective LiDAR cameras with supplementary proprietary hardware and software to enable a shorter mapping and modelling time while reducing cost. The product solution comes either as a UAV or wearable form factor which is lightweight (< 1kg) while providing comparable accuracy (1 cm) compared to commercialised scanning solutions. With its proprietary AI algorithm, it enables the autonomous fusion and time synchronisation of numerous sensor devices for ease of use and mapping optimisation.
The technology owner has engaged in various successful pilot test for data collection and generation of large-scale 3D models. The technology owner is currently seeking collaborative industrial partners who are open to explore a user-friendly and cost-effective 3D mapping product solution to generate their own digital twin to further their operational capabilities.
TECHNOLOGY FEATURES & SPECIFICATIONS
The product solution comes either as a UAV (outdoor) and wearable (indoor) form factor for various scanning application and environment. Compared to conventional LiDAR camera scanning solutions, the technology solution has the capabilities to:
- Reduce hardware cost by up to 35%
- Reduce modelling cost by up to 40%
- Reduce data collection time by up to 50%
- Reduce modelling time by up to 30%
- Provide comparable mapping accuracy of 1cm
In addition, the production solution has the functionalities of:
- Being user-friendly
- Wearable form factor is compact and lightweight (<1kg)
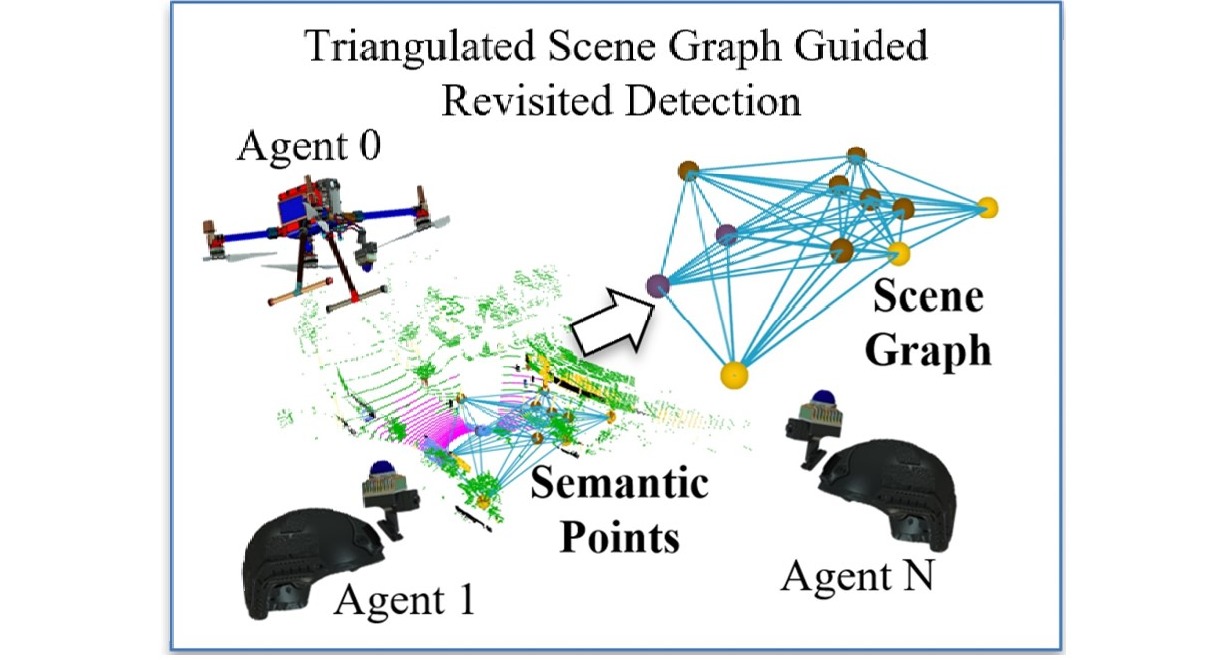
- Support collaborative mapping and large area scanning using multiple sensor devices via its AI proprietary algorithm
POTENTIAL APPLICATIONS
3D digital twin for large scale environment: The generation of 3D digital twin with centimetre-level high-accuracy point cloud maps are of paramount importance, especially when used for 3D digitalization and modelling within the construction and urban development landscape. The technology solution enables the utilisation of 3D scanning solution within indoor and outdoor environments.
SLAM optimisation of AGV and AMR use-case: The technology solution enables fast and accurate scanning capabilities to optimise any robotic automation deployed for operation efficiency. The technology solution also enables easy integration to these robotics to enhance their capabilities and functionalities.
Consolidation of point cloud datasets: Based on the AI proprietary algorithm, the technology solution is envisioned to consolidate and merge various point cloud dataset/platform to reconstruct an accurate BIM 3D model for operation and usage.
Autonomous scan-to-model digital platform: The scanning solution is able to speed up manual point-cloud to BIM processes through the use of AI algorithm capabilities for primitives' detection and spatial reasoning.
Unique Value Proposition
The cost-effective production solution comprises of lightweight form factor that provide affordable solutions with similar compared to traditional high-end mapping technologies. With the integration of hardware and software capabilities, it reduces mapping and modelling time, reducing labour costs and shortening project timelines. The user-friendliness and ease of integration enables easy compatibility with existing modelling software, minimising any disruption to current workflows. With the proprietary AI algorithm for autonomous sensor fusion, it provides an efficient and scalable mapping solution for large scale and complex environments.